有限公司")









产品详情
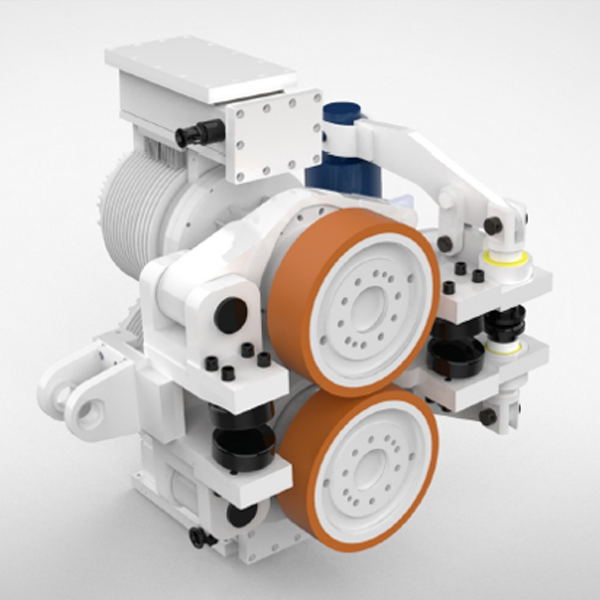
背负式机器人麦克纳姆轮
背负式机器人采用麦克纳姆轮作为行走驱动轮,设备的行走路径由软件进行差补计算,可实现二维平面内任意方向的移动功能,包括直行、横行、斜行、任意曲线移动。
背负式机器人有非接触式激光避障传感器,检测到障碍物后自动停止运行,障碍物移走后自动恢复运行。
运用行业:适于厂内部件的对接、转运等场台。

推荐产品:搬运机器人专用麦克纳姆轮
来源:
背负式机器人麦克纳姆轮,工业搬运车车轮的文档下载:
 PDF
PDF
上一篇:
料框抓取机器人车轮
下一篇:
搬运机器人专用麦克纳姆轮


