有限公司")








麦克纳姆轮在料框抓取机器人AGV中的应用
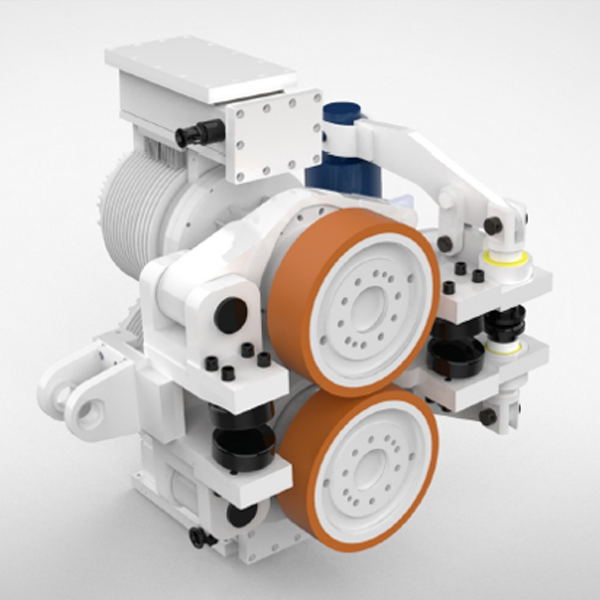
料框抓取机器人工业搬运车辆的一种,麦克纳姆轮可以实现料筐抓去机器人的全向移动,精准定位,实现注塑机工件料框的空框与满框交换、工件满框转运的搬运车辆,主要应用于注塑企业车间等实现自动接送料物流系统。由全向移动麦克纳姆轮和三轴滑、电动手指、爪、电气控制及导航系统等组成。采用伺服电机驱动的麦克纳姆轮作为整车的行走部件,从而可以实现在二维平面内任意方向移动功能。麦克纳姆轮可以实现包括直行、横行、斜行、意曲线移动、零回转半径转动等全向移动形式,真正实现无人操控。
麦克纳姆轮在料框抓取机器人中运用的特点:
1.实现料框抓取机器人全向移动自如;
2.颠覆传统,提高企业高科技程度;
3.麦克纳姆轮可以实现超高精度移动;
4.实现抓取机器人零回转半径;
5.无人操控,多种电机速度导航,实现无人操控,远程管理。
运用行业:
适用于注塑机工件料框的空框与满框交换、工件满框转运等注塑企业车间实现自动接送料物流系统。

来源:


