有限公司")





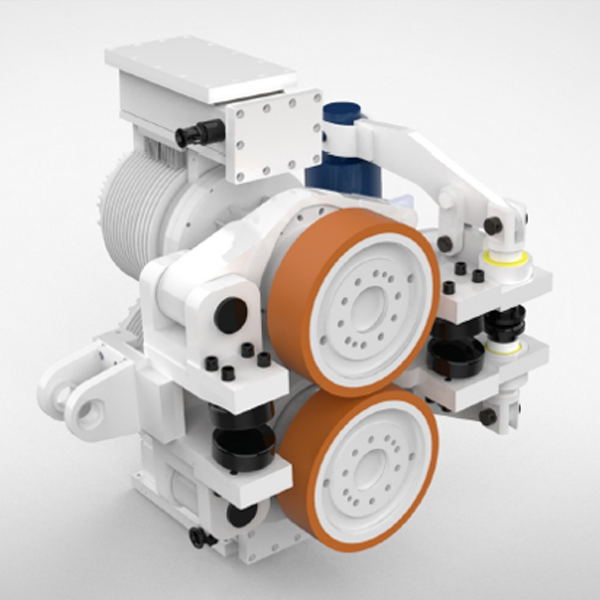



电动平板车用麦克纳姆轮
相比于普通的移动机器人,麦克纳姆轮式全方位移动AGV有着其独特的灵活运动优势,解决了两大难题:
狭小空间内的灵活穿梭
解决诸如S弯、直角弯等普通移动机器人“忘而却步”的通过性问题、利用横移才能通过的理论死角,不受空间、环境的约束; 平面内任意方向的快速精确定位
解决“最后一米”的移动问题,使得原本在装配、加工、运输过程中需花费数十个小时完成的精确对位问题,轻松地利用一个动作瞬间完成。
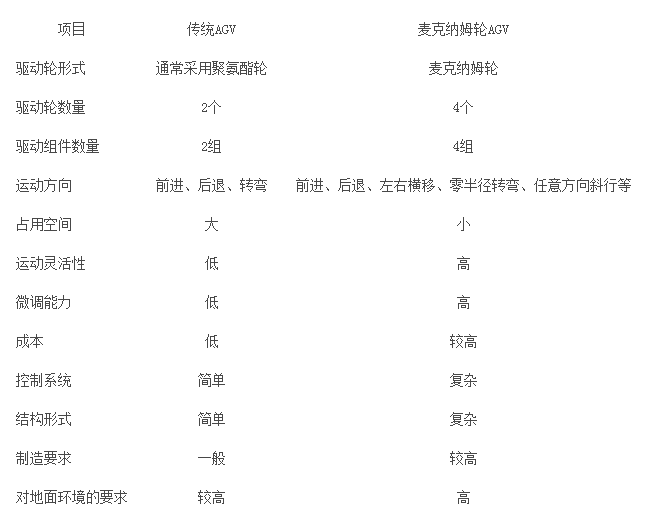
传统形式的AGV车轮通常采用聚氨酯轮,通过两轮差动原理实现转向功能,能够实现前、后、转弯等运动功能,目前广泛应用于汽车、电子、物流等行业。麦克纳姆轮AGV与传统AGV相比各有优缺点:麦克纳姆轮AGV运动灵活,微调能力高,运行占用空间小,但是成本相对较高,结构形式相对复杂,对控制、制造、地面等的要求较高,适用于空间狭小,定位精度要求较高、工件姿态快速调整的场合,传统AGV结构简单成本较低,但是其运动灵活性差,在空间受限的场合无法使用,难以实现工件微小姿态的调整。适用于空间较大、工件到位后对位置姿态等要求不高的场合。两者对比如下:
根据应用场景和功能的不同,麦克纳姆轮全方位移动AGV小车可分为几种类型:
基本型AGV:可作为通用移动底盘,俗称“平板车”,可将搬运的货物直接放在平台上进行输送,也可在底盘上进行改造,配套移载设备;
升降型AGV:升降平台或叉车结构形式,用于货架运输、高空作业,解决“最后一米”问题,快速对准;
滚筒型AGV:在基本型AGV的基础上,加装滚筒或输送带,可直接与生产车间流水线对接,代替人工完成上、下料的串联工作;
操作型AGV:利用移动式的AGV与机械臂组合应用,完成诸如焊接、抓取、钻孔等生产动作,减少了同种操作设备的数量,增加了运动灵活性。
来源:


